For documentation on the current version, please check Knowledge Base.
Optimize Point Cloud
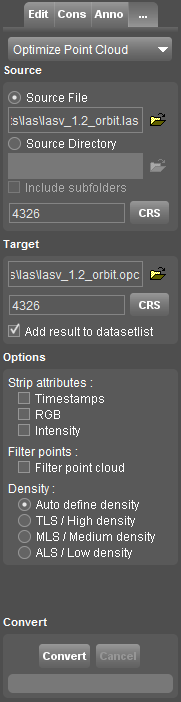
The ”Optimize Point Cloud” tool converts one or more supported LiDAR files into a single Orbit Point Cloud (*.opc) file.
The “Convert Point Cloud” tool converts any supported LiDAR file into another LiDAR file, one on one.
![]() Map 2D > Tools > … > Optimize Point Cloud
Map 2D > Tools > … > Optimize Point Cloud
Source
Select the source file or source directory.
When using a source directory all supported point cloud files of the selected directory (and optionally subfolders) will be used.
Set the coordinate reference systems of the source file(s).
If the CRS of the selected source file(s) is not defined, the current Map CRS will be used as default.
When using a source directory all supported point cloud files supposed to be in the same CRS.
Drag and drop of a LiDAR resource different from OPC will open and load the resources in the Optimize Point Cloud tool.
Target
Select target directory and set the coordinate system of the target Orbit Point Cloud.
Options
- Strip attributes
Remove the selected attributes from target file, useful if inapplicable or to reduce the file size. - Filter points
Delete points in areas with exaggerated density, this results in an equal maximum density. - Density
Set the point cloud density used for optimized storage and point filter.
Convert
Converting LiDAR data into an OPC can take some time depending the size of the source data, hardware specifications (processing power) and data access (disc speed and file access), read more...