For documentation on the current version, please check Knowledge Base.
Preferences of 3D Hover
This page describes the preferences related to the 3D Hover use on the Map 3D and Mobile Mapping Point Image and Point Cloud View.
![]() Main Toolbar > Preferences > 3D Hover
Main Toolbar > Preferences > 3D Hover
Concepts
The 3D Hover (“yellow puck”) represents the on the fly detected 3D surface around the position of the mouse pointer. The hover is based on screen pixels within the given query “Search Radius” for which a coordinate is known. A pixel coordinate can be derived from any visible dataset object from point cloud, vector or image resources. Overlays are not taken into account.
If, given the 3D Hover Query settings, no 3D surface can be detected around the mouse pointer position as seen from the current 3D view point, no hover will be displayed no 3d coordinate measurement will possible.
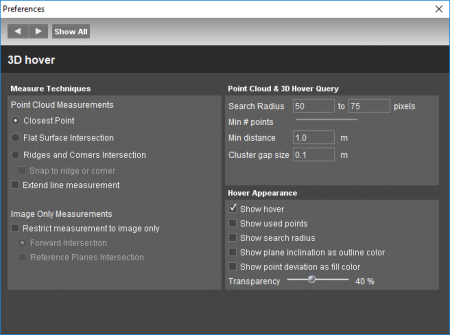
Preference Panel
Measure Techniques
Point Cloud Measurements
Choose the measure technique to be used for measurements based on Point Cloud.
- Closest Point
- Flat Surface Intersection (default)
- Ridges and Corners Intersection
- Extend line measurement - Option to add an additional part to an ongoing object measurement. All parts will be saved as a single object.
For more information about point cloud measurements, see :
Image only Measurements
- Restrict measurements to image only
- Forward intersection : measurement is based on triangulation, see Measurements via Forward Intersection.
- Reference planes intersection : coordinate measurement by intersecting the horizontal or vertical reference planes.
Pointcloud & 3D Hover Query
Define 3D Hover radius around the current mouse pointer position to select all pixels for which a 3D coordinate is know.
- Search Radius: minimum and maximum search radius in pixels.
- Min # points: minimum amount of detected points to form the hover.
- Min distance: minimum distance between the hover and the viewer focus position. In the image viewer this is equal to the photo position. In the 3D view this is equal to the position of the viewer focus.
If there aren't enough Pixel Coordinates (Min # points) within the defined Search Radius due to the above set conditions, no 3D Hover can be calculated, so no point cloud measurements will be possible.
Appearance
Set the appearance of the 3D Hover
- Show hover
- Show used points
- Show search radius
- Show plane inclination as outline color
- Show point deviation as fill color
- Transparency