For documentation on the current version, please check Knowledge Base.
This is an old revision of the document!
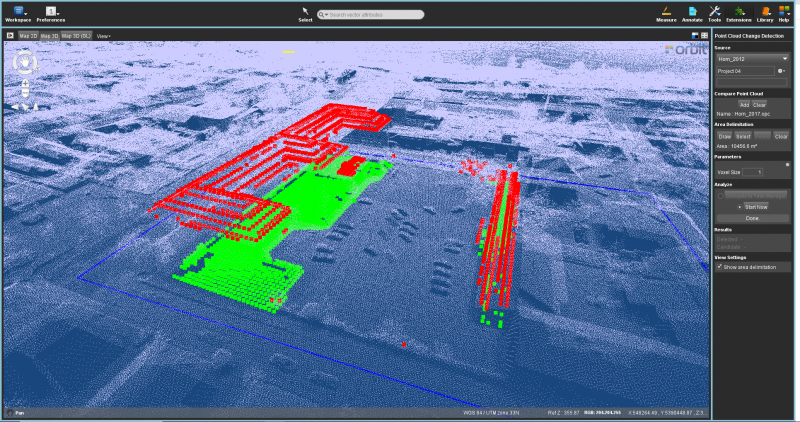
Point Cloud Change Detection
 This page describes how to use the extension “Point Cloud Change Detection”
This page describes how to use the extension “Point Cloud Change Detection”
![]() Main Toolbar > Extensions > Point Cloud Change Detection
Main Toolbar > Extensions > Point Cloud Change Detection
The “Point Cloud Change Detection” extension makes it possible to compare
Concepts
The change between two pointclouds can be analyzed
Source
Every pointcloud from the datasetlist can be selected in the source dropdown list.
Parameters
Algorithm
Voxel Size
The selected area is divided in voxels. For every voxel, the change detection will be applied on how many points are added or removed.
Voxels Change Pts Min
The minimum number of points that should be added or removed in a voxel voxel in order to add the voxel and the points to the result datasets.
Voxels Context Min
The minimum number of voxels that should be around a voxel in order to consider the voxel. This to exclude isolated voxels.
Output
T
Results
A vector file