3D Laser Mapping
This page describes the original 3D Laser Mapping StreetMapper or V-Mapper mobile mapping resources for Orbit import.
Use the corresponding Orbit Import Template to import the described original data.
It is recommend to read first Orbit Mapping Resource.
Trajectory
- File format : one ascii *.pos text file
- File structure Rows : each trajectory timestamp is one record
- File structure Columns : single space separated (char32), no headers, with exact order as the example below
- Value “Timestamp” : GPS Absolute time or GPS Week time, decimal notation.
- Value of Coordinates : any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator.
- Value “height” or “Z” : Height above ellipsoid, decimal notation, without thousands separator.
timestamp, x/long, y/lat, height, roll, pitch, heading, Y-accuracy, X-accuracy, Z-accuracy, pitch-accuracy, roll-accuracy, heading-accuracy 576914.5075 33.039202814 -97.282371203 164.913 -0.3929 2.3931 -69.6806 0.012 0.010 0.020 0.002 0.002 0.003 576914.5100 33.039202853 -97.282371325 164.914 -0.3865 2.3907 -69.6765 0.012 0.010 0.020 0.002 0.002 0.003 576914.5125 33.039202893 -97.282371448 164.914 -0.3809 2.3883 -69.6719 0.012 0.010 0.020 0.002 0.002 0.003 ...
Panoramas
Image files
- Image type : Ladybug 3 or 5, equirectangular panoramas
- Image resolution : ration 2×1, advised 8000×4000 pixels
- File format : each image is one *.jpg file
- File name : exactly as “filename” value of image positions file, see below last column
- Folder structure : All files in one folder.
Image positions file
- File format : one ascii text file
- File structure Rows : each image is one record
- File structure Columns : tab separated (char9), no headers, with exact order as the example below
- File structure Columns, from next version of SMProcess : timestamp, longitude, latittude, height, roll, pitch, heading, filename
- Value “x,y,z” : Same CRS as Trajectory, decimal notation, without thousands separator
timestamp, x/long, y/lat, z, heading, pitch, roll, filename 577729.913460 -97.28428505 33.03699795 167.312 14.6223 1.6618 5.2018 stream-000000_00000.jpg 577730.246772 -97.28428232 33.03700644 167.312 14.6550 1.6490 5.1536 stream-000000_00001.jpg 577730.580112 -97.28427957 33.03701482 167.311 14.6657 1.6493 5.2152 stream-000000_00002.jpg ...
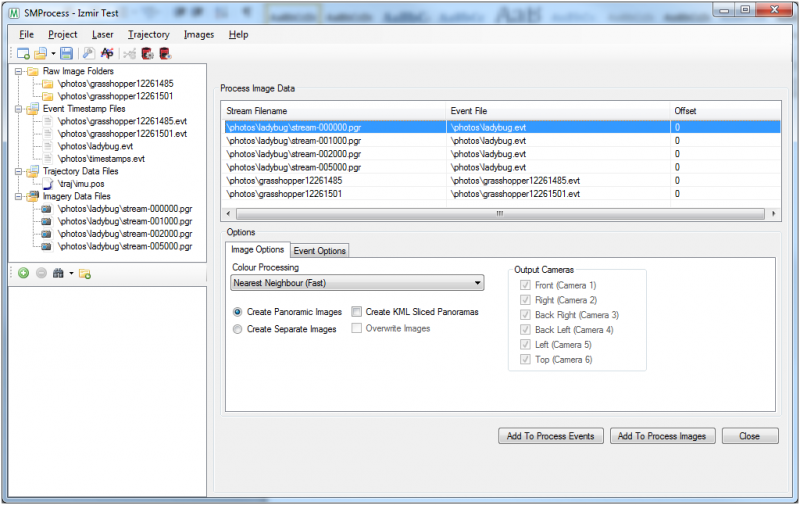
Export from SMProcess
- Open your project in SMProcess
- Add the ladybug streams to the project that need processing
- Go to ‘Process Image Data’
- Select the ladybug stream to process
- Select the ‘Create Panoramic Images’ option
- Click the ‘Add To Process Images’ button
- Click on the ‘Event Options’ tab at the bottom
- Select the ‘Create Orbit Photo List’ option
- Click ‘Add To Process Events’ to create the Orbit Photo List
- This file will be used in Orbit to import the panoramic image positions
LiDAR
Point cloud files
- File format : one or more *.las or *.laz files
- File structure : default Las structure version 1.2
- Latittude, Longitude, Elevation : Same CRS as Trajectory
- Value of Timestamp : Same reference as Trajectory.
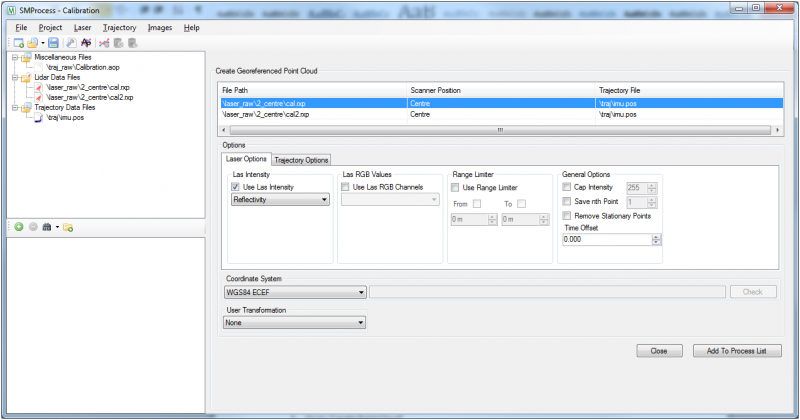
Export from SMProcess
- Open your project in SMProcess
- Add the lidar data to the project
- Go to ‘Create Point Cloud’
- Select the lidar file to process
- Select the options to process with and the coordinate system to GeoReference it in
- Click ‘Add To Process List’ to start processing the point cloud