Prepare Generic Mobile Mapping Data
This page describes the original generic mobile mapping resources for Orbit import.
Use the corresponding Orbit Import Template to import the described original data.
It is recommend to read first Concepts of Mobile Mapping and UAS data in Orbit.
Trajectory
Trajectory file
- File format : One ascii *.csv or *.txt file.
- File structure Rows : One record for each trajectory timestamp. Line ends by carriage return char(13) and newline char(10) sequence.
- File structure Columns : Tab separated (char9), headers, with exact order as the example below.
- Value of Coordinates : Any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator.
- Timestamp : Any supported time reference can be used, decimal notation without thousands separator.
Timestamp X/Long Y/Lat Z Pan Tilt Roll X_Rms Y_Rms Z_Rms 413271 -97.69470338 30.34089708 188.8011 0.019045 0.018966 0.060342 0.019 0.017 0.035 413272 -97.69456161 30.34081464 187.8982 0.018057 0.017994 0.059934 0.014 0.013 0.029 ...
Panoramas
Image files
- Image type : Equirectangular panoramas.
- Image resolution : Ratio 2×1.
- Image orientation : Center pixel is orientation reference.
- File format : One *.jpg file for each image.
- File name : Exactly as “Filename” value of photo position file, see below.
- Folder structure : All files in one folder.
Image positions file
- File format : One ascii *.txt or *.csv file.
- File structure Rows : Each image is one record. Line ends by carriage return char(13) and newline char(10) sequence.
- File structure Columns : Tab separated (char9), headers, with exact order as the example below.
- Filename : Image filename as on disk, without file extension.
- Coordinates : Same reference as Trajectory, Long/Lat order for geographical coordinates, decimal notation, without thousands separator..
- Timestamp : Same reference as Trajectory.
Filename X/Long Y/Lat Z Pan Tilt Roll Timestamp 1000000 4.404878286326054 50.85106227753124 128.33142823723782 88.132974310915699 0.095102381910084 -359.06942401248796 0 1000001 4.404918241374241 50.85107702770032 128.37570893339338 39.507857332631851 -1.084923642050256 -359.32845731111627 1 ...
Planars
Image files
- Image type : Undistorted images.
- Image resolution : Any.
- File format : Each image is one *.jpg file.
- File name : Exactly as “Filename” value of photo position file, see below.
- Folder structure : All image files of one camera in one folder.
Image positions files
- File format : One ascii file (*.csv or *.txt file) per camera.
- File structure Rows : Each image is one record.
- File structure Columns : Semicolon seperated (char59), headers, with exact order as the example below.
- Value of Filename : File name as on disk, without file extension.
- Value of Coordinates : Any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator..
- Value of Timestamps : Same Time Reference as in the point cloud, see below.
Filename;Timestamp;X/Long;Y/Lat;Z;Omega;Phi;Kappa 1000000;0;4.404878286326054;50.85106227753124;128.33142823723782;88.132974310915699;0.095102381910084;-359.06942401248796 1000001;1;4.404918241374241;50.85107702770032;128.37570893339338;39.507857332631851;-1.084923642050256;-359.32845731111627 ...
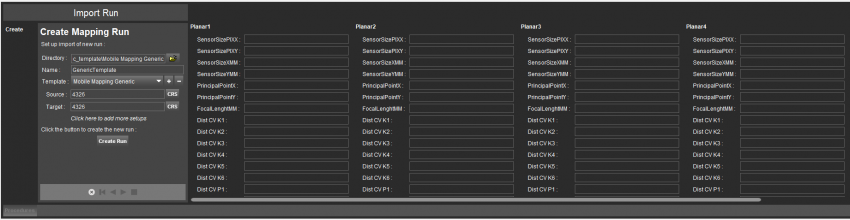
Camera calibration file
- File format : One ascii file for each camera
SensorSizePIX=2046,2046 SensorSizeMM=1.12530000000E+001,1.12530000000E+001 PrincipalPoint=-2.61956763602E-001,-1.56800990463E-001 FocalLenghtMM=8.22273991883E+000 DistortionType=6 Dist_CV_K1=-1.846504319177130E-001 Dist_CV_K2=1.285589751369390E-001 Dist_CV_K3=-2.821016417454580E-002 Dist_CV_K4=0.000000000000000E+000 Dist_CV_K5=0.000000000000000E+000 Dist_CV_K6=0.000000000000000E+000 Dist_CV_P1=-3.798480723832470E-004 Dist_CV_P2=3.031639898513610E-004 Dist_CV_CX=9.753714975268900E+002 Dist_CV_CY=1.051509270993260E+003 Dist_CV_FX=1.495043621605830E+003 Dist_CV_FY=1.495043621605830E+003 Dist_CV_HEIGHT=2046 Dist_CV_WIDTH=2046
The camera calibration parameters must be entered before Create Run, the 1st step of the Import Run procedure.
To facilitate import, your specific camera calibration values can be registered inside the Orbit template to avoid entering these values at import each time. Contact Orbit Support if assistance is needed.
LiDAR
Point cloud files
- File format : One or more supported point cloud file formats.
- File structure : Las/Laz or Ascii *.txt, *.csv file.
- Las (recommended) or Laz : Las version 1.2.
- Ascii File : Space separated (Char32), headers, with exact order as the example below. Line ends by carriage return char(13) and newline char(10) sequence.
- Value of Coordinates : Same reference as Trajectory.
- Value of Timestamp : Same reference as Trajectory.
Long(X) Lat(Y) Z R G B I 4.40487692010655 50.8510926423286 125.763312461527 16 17 19 46 4.40487698750245 50.8510916370433 125.761583937394 16 17 19 46 ...