Prepare UAS Data using Agisoft
This page describes UAS data processed in Agisoft for Orbit.
Using the corresponding template from 3D Mapping Data Preparation and Import Templates the described resources can be imported into Orbit.
It is strongly recommend to read first Concepts of Mobile Mapping and UAS data in Orbit.
Planar Images
Image files
- Image type: Undistorted (corrected distortion and Central Principal Point) planar images.
- File format: Each image is one *.jpg file.
- Filename: Exactly as in image positions file, see below.
- Folder structure: All files in one folder.
Image Positions File
- File format: One ASCII file.
- File structure Rows: The first line is the header, each image is one record.
- File structure Columns: space-separated (char9), with exact order as the example below (more columns are allowed but first 7 should be as shown below).
- Value of Filename: Filename as on disk, with file extension.
- Value of Coordinates: any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator.
- Value of Angles “Omega;Phi;Kappa” : Omega, Phi, Kappa orientation angles, degrees.
imageName X Y Z Omega Phi Kappa 1.jpg 105421.073358 189342.752172 93.740539 -0.254738 -0.901362 -49.479651 2.jpg 105427.559962 189351.212718 94.748443 0.483959 -1.219746 -49.066694 3.jpg 105435.888819 189359.813850 94.299853 -1.218867 -0.174640 -48.812096 4.jpg 105442.685596 189367.297237 93.095857 -1.177595 -0.136665 -49.327240 5.jpg 105449.298973 189375.020258 92.253560 -1.100689 0.377558 -49.242277 ...
Camera calibration file
The camera calibration information can be found in the “Report” exported from Agisoft
- File format: One *.pdf file, containing among others camera calibration information (camera name, sensor width in pixels, sensor height in pixels, sensor pixel size in micron, F pixels, Cx pixels, Cy pixels) and CRS.
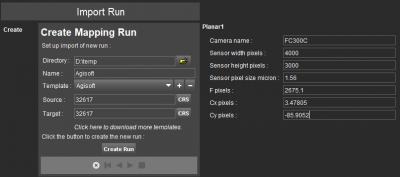
The camera calibration parameters must be entered before Create Run, the 1st step of the Import Run procedure.
To facilitate import, your specific camera calibration values can be registered inside the Orbit template to avoid entering these values at import each time. Contact Orbit Support if assistance is needed.
Point Cloud
- File format : One or more *.las files.
- File structure : Las version 1.2.
Orthomosaic
- File format : Any supported image data format.
The ortho is not a part of the UAS Mapping Run, it can be added separately to the Map view.
Convert the Orthomosaic file into *.omi format for enhanced performance.