Table of Contents
Prepare MM Data 3D Laser Mapping
This page describes how to prepare 3DLM StreetMapper or V-Mapper mobile mapping resources for Orbit.
Using the 3D Laser Mapping Orbit Import Templates SMProcess prepared resources can be imported into Orbit.
It is strongly recommended to read first Concepts of Mobile Mapping and UAS data in Orbit.
Trajectory
- File format : one ascii *.pos text file
- File structure Rows : each trajectory timestamp is one record
- File structure Columns : single space separated (char32), no headers, with exact order as the example below
- Value “Timestamp” : GPS Absolute time or GPS Week time, decimal notation.
- Value of Coordinates : any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator.
- Value “height” or “Z” : Height above ellipsoid, decimal notation, without thousands separator.
timestamp, x/long, y/lat, height, roll, pitch, heading, Y-accuracy, X-accuracy, Z-accuracy, pitch-accuracy, roll-accuracy, heading-accuracy 576914.5075 33.039202814 -97.282371203 164.913 -0.3929 2.3931 -69.6806 0.012 0.010 0.020 0.002 0.002 0.003 576914.5100 33.039202853 -97.282371325 164.914 -0.3865 2.3907 -69.6765 0.012 0.010 0.020 0.002 0.002 0.003 576914.5125 33.039202893 -97.282371448 164.914 -0.3809 2.3883 -69.6719 0.012 0.010 0.020 0.002 0.002 0.003 ...
Panoramas
Image files
- Image type : Ladybug 3 or 5, equirectangular panoramas
- Image resolution : ration 2×1, advised 8000×4000 pixels
- File format : each image is one *.jpg file
- File name : exactly as “filename” value of image positions file, see below last column
- Folder structure : All files in one folder.
Image positions file
- File format : one ascii text file
- File structure Rows : each image is one record
- File structure Columns : tab separated (char9), no headers, with exact order as the example below
- File structure Columns, from next version of SMProcess : timestamp, longitude, latittude, height, roll, pitch, heading, filename
- Value “x,y,z” : Same CRS as Trajectory, decimal notation, without thousands separator
timestamp, x/long, y/lat, z, heading, pitch, roll, filename 577729.913460 -97.28428505 33.03699795 167.312 14.6223 1.6618 5.2018 stream-000000_00000.jpg 577730.246772 -97.28428232 33.03700644 167.312 14.6550 1.6490 5.1536 stream-000000_00001.jpg 577730.580112 -97.28427957 33.03701482 167.311 14.6657 1.6493 5.2152 stream-000000_00002.jpg ...
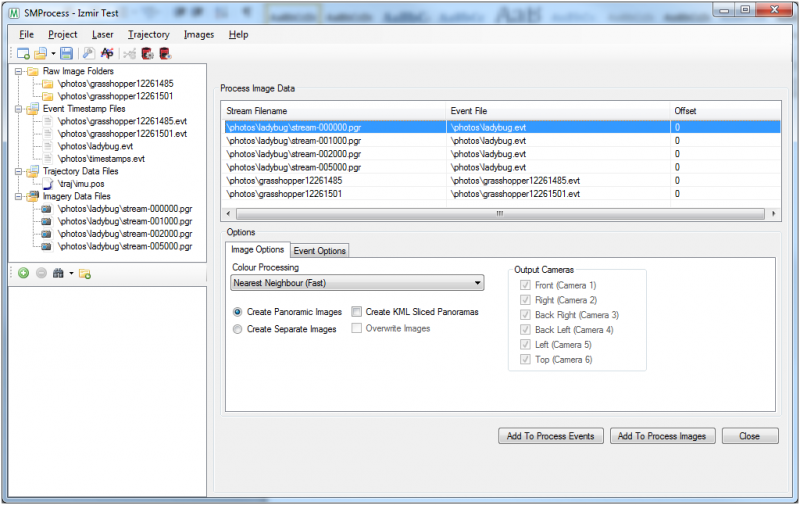
Export from SMProcess
- Open your project in SMProcess
- Add the ladybug streams to the project that need processing
- Go to ‘Process Image Data’
- Select the ladybug stream to process
- Select the ‘Create Panoramic Images’ option
- Click the ‘Add To Process Images’ button
- Click on the ‘Event Options’ tab at the bottom
- Select the ‘Create Orbit Photo List’ option
- Click ‘Add To Process Events’ to create the Orbit Photo List
- This file will be used in Orbit to import the panoramic image positions
LiDAR
Point cloud files
- File format : one or more *.las or *.laz files
- File structure : default Las structure version 1.2
- Latittude, Longitude, Elevation : Same CRS as Trajectory
- Value of Timestamp : Same reference as Trajectory.
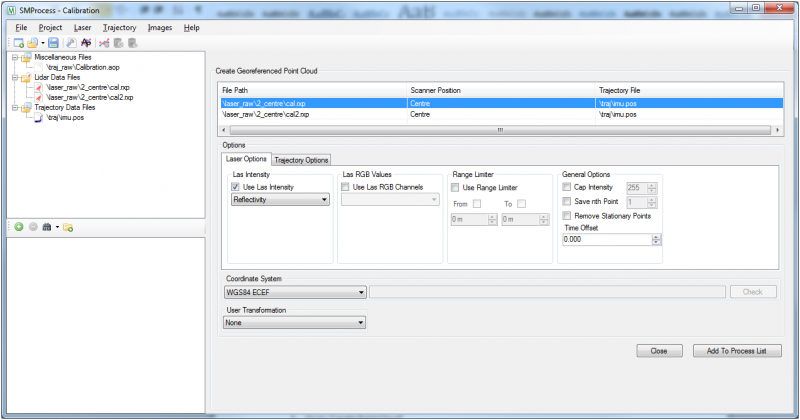
Export from SMProcess
- Open your project in SMProcess
- Add the lidar data to the project
- Go to ‘Create Point Cloud’
- Select the lidar file to process
- Select the options to process with and the coordinate system to GeoReference it in
- Click ‘Add To Process List’ to start processing the point cloud