
stereo: map and view your data in stereo
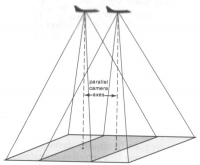 Stereoscopy (also called stereoscopics or 3D imaging) is a technique for creating or enhancing the illusion of depth in an image by means of stereoscopic for binocular vision. Most stereoscopic methods present two offset images separately to the left and right eye of the viewer. These two-dimensional images are then combined in the brain to give the perception of 3D depth. This technique is distinguished from 3D displays that display an image in three full dimensions, allowing the observer to increase information about the 3-dimensional objects being displayed by head and eye movements.
Stereoscopy (also called stereoscopics or 3D imaging) is a technique for creating or enhancing the illusion of depth in an image by means of stereoscopic for binocular vision. Most stereoscopic methods present two offset images separately to the left and right eye of the viewer. These two-dimensional images are then combined in the brain to give the perception of 3D depth. This technique is distinguished from 3D displays that display an image in three full dimensions, allowing the observer to increase information about the 3-dimensional objects being displayed by head and eye movements.
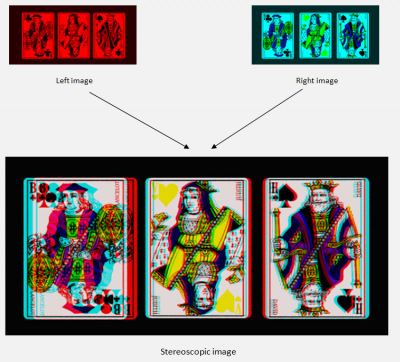
Anaglyph is a method to view stereo photos. In anaglyph two separate images are shown on each other, a red image for the left and a cyan image for the right eye. These images are split when looking them with special glasses, so-called 'anaglyph' glasses (a red filter left, and a cyan filter right). (source images and text based on wikipedia).
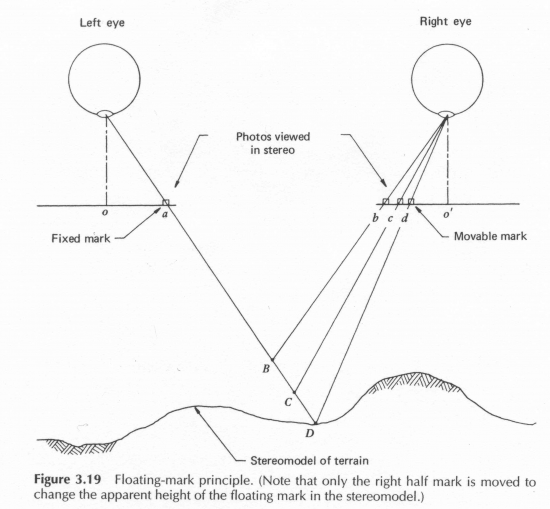
floating mark
Floating mark is a mark seen as occupying a position in the 3 dimensional space formed by the stereoscopic fusion of a pair of vertical photograph and used as a reference mark for examining or measuring the stereoscopic model.
(Source)
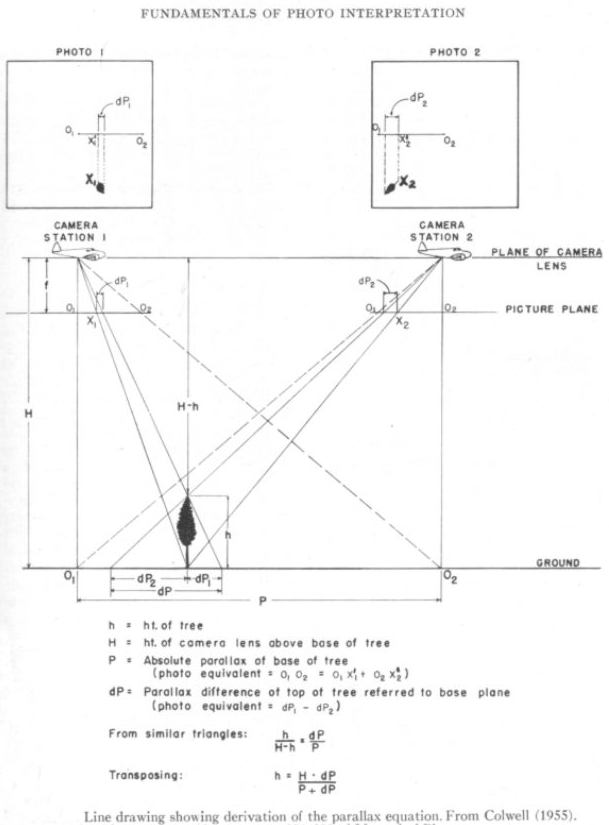
Differential parallax
The dP term is the differential parallax. We find it by measuring the distance between the base and the top of the feature or between two proximate terrain points at different elevations on a slope, that we locate in each of the two photos when the pair is in optimum alignment for stereo viewing. Then, dP is the numerical difference between the two distance values (x2 - x1), which is different in each of the photo pairs. We can optically find the value of dP by using special devices, such as a stereometer, a parallax wedge, or, most commonly, a parallax bar. Each uses a variant of the “floating point” method in which reference marks–dots or crosses–are visible when we view the aligned photos under a mirror stereoscope. We place the parallax bar on the photo plane so that a fixed mark over one photo coincides with a movable mark (fused visibly in the stereo view) by turning a screw drive that translates that mark into coincidence. We then read the value of dP from a graduated scale. When we do this for a number of points, then, we can calculate heights and relief values for parts of the map. These become absolute values (elevations), if we reference the points to benchmarks.
More information & source can be found at :