For documentation on the current version, please check Knowledge Base.
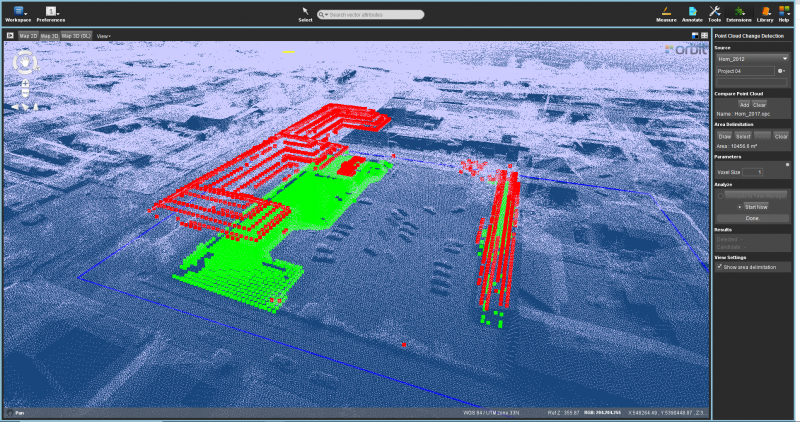
Point Cloud Change Detection
This page describes how to use the extension “Point Cloud Change Detection”
![]() Main Toolbar > Extract > Point Cloud Change Detection
Main Toolbar > Extract > Point Cloud Change Detection
The “Point Cloud Change Detection” extension makes it possible to compare 2 point clouds.
Concepts
The change between two point clouds can be analyzed by dividing the point cloud in voxels and counting the number of added and removed points within every voxel.
Point cloud change detection project files are stored in the same location as the source point cloud.
Source
Use the generic workflow for Point Cloud Based Extensions to define the source file.
The method for the range of interest is 'Area'.
Compare Point Cloud
Add the active point cloud dataset from the dataset list that will be compared with the source point cloud dataset.
Parameters
Generic concepts, see Preferences for Detectors
Results
Voxel Result
The change_voxels vector file includes all the voxels that have added or removed points in the change analysis. Every voxel has the attributes:
- FD_PointCount1: Number of points in voxel in source point cloud
- FD_PointCount2: Number of points in voxel in compared point cloud
- FD_PointCloudDelta: The difference in points between the source and compared point cloud
- FD_PointCloudDeltaAbsolute: The absolute difference in points between the source and compared pointcloud
Depending on the chosen output parameters, the following results are available:
Cluster Results
This change_voxel_clusters vector file clusters the voxels that are within the clustering distance. Every cluster has the attributes:
- Cluster size: Number of voxels in cluster
- FD_AvgPointCount1: Number of points in cluster in source point cloud
- FD_AvgPointCount2: Number of points in cluster in compared point cloud
- FD_AvgPointCloudDelta: The difference in points between the source and compared point cloud in the cluster
- FD_AvgPointCloudDeltaAbsolute: The absolute difference in points between the source and compared pointcloud in the cluster
Create Added OPC and Removed OPC
The results are two opc and ops files:
- The added points in the compared pointcloud
- The removed points in the compared pointcloud