For documentation on the current version, please check Knowledge Base.
Post Collection Calibration of Camera
If point cloud and imagery don't match perfect and the exact camera calibrations (lever arms and delta heading/pan, tilt/pitch and roll) are not known, Orbit is able to calculate these camera calibration values.
This page describes how to provide the required information in order to create the perfect calibration and Orbit Import Template.
Import MM data using a temporary template
Import your Mobile Mapping data in Orbit using a temporary template :
Import Theme Calibration Points
To create a good set of reference points we advise using the Asset Inventory procedures and the Inventory Theme which one you can download below.
Download and Import this Theme into your Orbit AI installation.
- Download and extract : calibration_points.zip
-
- Give this Theme a clear and wise name e.g. <Project name>_calibration_points
- Do not change the coordinate system while importing.
Measure Calibration Points
A calibration point or reference point is a clearly identifiable position in the Point Cloud and on an image, with following information :
- Exact position measured in Point Cloud
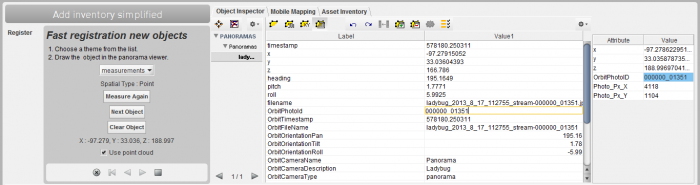
- OrbitPhotoID : Orbit Photo ID of the image on which the measured point cloud position can be indicated.
This OrbitPhotoID must be copied from the imported photo positions. It is the identifier to a given image used by Orbit. One can check these photo position attributes of the selected photo position objects using the Object Inspector. - Photo_Px_X : The pixel coordinate X on the reference image of the measured position.
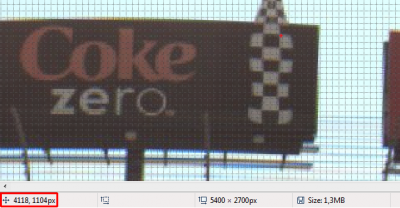
- Pixel coordinates (0,0) are the left upper corner of the image.
- Use e.g. IrfanView or Paint to get these values.
- Photo_Px_Y : The pixel coordinate Y on the reference image of the measured position
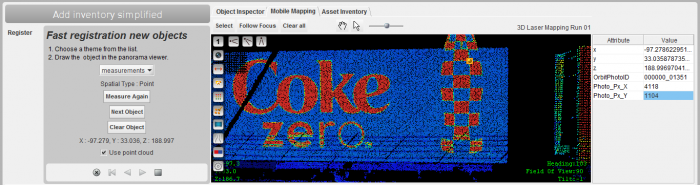
Use the Asset Inventory procedure "Add inventory simplified" to measure these calibration points :
- Measure in 3D or on an approximated oriented images but use the point cloud as reference.
- Complete the Inventory attributes OrbitPhotoID, Photo_Px_X and Photo_Px_Y
- Once finished click “Next Object” to measure another reference point.
At least 12 calibration points using 4 or more reference images are required to make a good calibration possible.
It is advised to have a well-distributed set of points along the run and on the image. Calibration points in all quadrants are a must.
Take your time to create a good calibration dataset. Measure carefully and work precise. It is a one time effort for all feature imports.
Sent files
Sent the Calibration Points and the Photo Position dataset to support at orbitgis dot com.
This calibration tool is not available in the current release. But one of our support engineers will process your request and create your customized import template.
Export Theme Calibration Points
Export the Inventory Theme used to collect the Calibration Points :
-
- Do not change the coordinate system while exporting.
- Export to .ovf
Photo Positions
It is not required to export the used photo positions. You can sent the whole photo position dataset.
Copy this dataset from the Orbit Run directory :
- Panoramas : <Orbit Run directory>/Panorama1/locations.ovt + locations.ord
- Planars : <Orbit Run directory>/PlanarX/locations.ovt + locations.ord
Import configurations
Copy the import conifugration file :
- Panoramas : <Orbit Run directory>/Panorama1/import/import_locations.ord
- Planars : <Orbit Run directory>/PlanarX/import/import_locations.ord
Sample Image
Provide one sample image.