For documentation on the current version, please check Knowledge Base.
Clash Detection
This page describes the Orbit desktop extension “Clash Detection”.
![]() Main Toolbar > Extensions > Clash Detection
Main Toolbar > Extensions > Clash Detection
Concepts
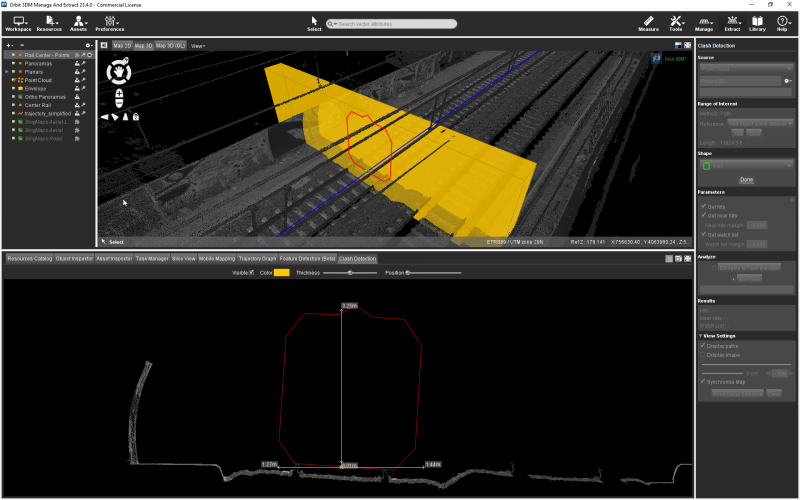
The Clash Detection extension detects clusters of points within a volume that is defined by moving a vertical shape along a 3D path.
Clusters detected within the shape are hits. There are two buffers around the shape: near hits and watch list clusters.
The vertical shape can be added to the Clash detection via the Shape creator extension.
Source
Use the generic workflow for Point Cloud Based Extensions to define the source file.
Range of Interest
A Line or Point dataset can be used as Path.
Rail Track Roll
The rail track roll can be applied to position the Clash Detection Shape.
This requires the Range of Interest Path to be a sequence of points, having a roll value attribute.
Accepted Attribute Value Names:
FD_OrbitOrientationRoll(Created by Orbit when using the Dataset Preset Rail)OrbitOrientationRoll(Created by Orbit to import Mapping Resource Photo Positions)OrientationRollRoll
Shape
Drop-down menu of available shapes
Choose the 2D shape from the list of default and custom-made shapes. Use the Shape Creator to add new shapes.
Position Shape on Path
Opens the “Clash Detection” tab, and gives the possibility to adjust the position of the 2D Shape on the 3D Path. By default, the shape will be centered around the path, by drag & drop it can be re-positioned.
Parameters: Algorithm
Get Hits
Detect clusters of points inside the selected shape along the path.
Get near hits
Detect clusters of points outside of the shape but within the 'Near hits margin'. 'Watch list' buffer distance parameters is expected to be bigger than one from 'Near hits'.
Get watch list
Detect clusters of points outside of the shape + near hits but within the 'Watch list margin'. 'Watch list margin' parameter is expected to be larger than the 'Near hits margin'.
Ignore from the bottom
Ignore clusters below the selected shape. No hits, near hits or watchlist clusters are created below the shape.
Cluster results
Cluster the point cloud selection for every clash type to detect different objects.
Cluster points min
The minimum number of points to be considered as a clash. The cluster is cumulative, starting with the initially detected points, new points are added to the same cluster if they are in a certain 3D distance (Cluster distance). If new points are detected at a larger distance from the last detected point in the cluster, they will constitute a new cluster.
Interpolate roll
Roll is applied to the shape when it is available as attribute of the reference path lines. A line should have 2 attributes, ROLL_1 and ROLL_2 that correspond to the roll at the start and end points of the line. If interpolate roll is not checked, the ROLL_1 is applied to the shape at the start of the line and the ROLL_2 is applied at the end. If interpolate roll is checked, intermediate roll values are calculated and applied at predefined steps of the line (Interpolate step).
Parameters: Output
Get selection per type and per cluster
Create one point cloud selection file per clash type, and/or create one selection file per cluster.
Get cluster outline
Create outline areas of the clusters, an outline 2D and an outline 3D are created. This outline is a rectangle if option Outline fit rectangle is checked. All outlines are added to a dataset, and optionally single outline files can be created per feature if option Get outline file per cluster is checked. Initial outline segment length defines the minimum length for first segments of the outline, this outline is then adjusted with cluster points, the smaller this value the more detailed the outline can be.
Apply classification on clustering
Clusters will only be created with points from the same point cloud class.