For documentation on the current version, please check Knowledge Base.
Point Cloud Change Detection
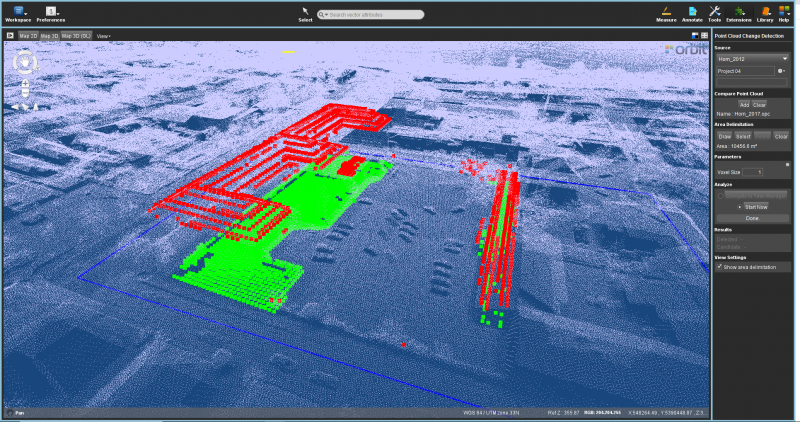
This page describes how to use the extension “Point Cloud Change Detection”
![]() Main Toolbar > Extensions > Point Cloud Change Detection
Main Toolbar > Extensions > Point Cloud Change Detection
The “Point Cloud Change Detection” extension makes it possible to compare
Concepts
The change between two point clouds can be analyzed by dividing the point cloud in voxels and counting the number of added and removed points within every voxel.
Point cloud change detection projects and associated files are stored next to the source point cloud.
Source
Every point cloud from the datasetlist can be selected in the source dropdown list.
The active pointcloud from the datasetlist can be added as the pointcloud that will be compared with the source point cloud.
The area wherein the change analysis will be executed can be drawn in the map component, added from the selected objects or the drawn fence.
Parameters
Algorithm
Voxel Size
The selected area is divided in voxels with a defined size. For every voxel, the change detection will give information on how many points are added or removed.
For less dense point clouds, a higher voxel size should be used.
Voxels Change Pts Min
The minimum number of points that should be added or removed in a voxel in order to add the voxel to the result datasets.
Voxels Context Min
The minimum number of voxels that should be around a voxel in order to consider the voxel. This to exclude isolated voxels.
Output
Voxel Result
The change_voxels vector file includes all the voxels that have added or removed points in the change analysis. Every voxel has the attributes:
- FD_PointCount1: Number of points in voxel in source point cloud
- FD_PointCount2: Number of points in voxel in compared point cloud
- FD_PointCloudDelta: The difference in points between the source and compared point cloud
- FD_PointCloudDeltaAbsolute: The absolute difference in points between the source and compared pointcloud
Depending on the chosen output parameters, the following results are available:
Cluster Result
This change_voxel_clusters vector file clusters the voxels that are within the clustering distance. Every cluster has the attributes:
- Cluster size: Number of voxels in cluster
- FD_AvgPointCount1: Number of points in cluster in source point cloud
- FD_AvgPointCount2: Number of points in cluster in compared point cloud
- FD_AvgPointCloudDelta: The difference in points between the source and compared point cloud in the cluster
- FD_AvgPointCloudDeltaAbsolute: The absolute difference in points between the source and compared pointcloud in the cluster
Create Added OPC and Removed OPC
The results are two opc and ops files:
- The added points in the compared pointcloud
- The removed points in the compared pointcloud