For documentation on the current version, please check Knowledge Base.
Customized Mobile Mapping Run, version 2 / 10.5
A template is a set of predefined configurations dedicated for one single type or set of Mobile Mapping data.
But the Orbit engine offers all configuration possibilities to customize and optimize the import for using any kind of mobile mapping data.
Once all configuration are known, it can be added as new import template to extremely simplify all feature imports.
We do advise to create or modify your own template in consultation with the Orbit support team.
(support at orbitgis dot com)
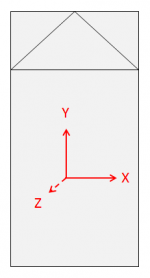
Vehicle Axis
Run Settings
<template>/orbit_mm_run.omr
| project.type | Type of mobile mapping data. |
| photo.camera.height | Height from the camera above the ground. This height will be used as default value for calculating the ground level for overlaying 2D vector data. |
| fixed.local.crs | default 4326, or different if specified. Use EPSG code to define custom CRS. |
| photo.file.extension | default .jpg, but any supported image format can be used (specify using file extensino e.g. .ecw |
| data2d.overlay.min.offset | photo psition Z + value for data2d.overlay.min.offset = minimum height for 2D objects overlay |
| data2d.overlay.max.offset | idem but maximum height for 2d objects overlay |
Panoramas
<template>/panorama/import/import_locations.csv.import.ini
<template>/panorama/import/import_locations.csv.import.ovf
<template>/panorama/import/import_locations.ord
| 1 | PhotoId | ||
| 2 | PhotoGroupId | ||
| 3 | Timestamp | The timestamp is dispalyed in the left lower corner of the image view. GPS Time If (Timestamp > 900,000,000) and (Timestamp < 2,000,000,000) and (Timestamp = Integer value) then Orbit will read the value as GPS time and will show the well-known UTC syntax : GPS time 2,000,000,000 will be displayed as 2043-05-23 03:33:04. Note that leap seconds are not taken into account, read Wikipedia, GPS Timekeeping and Wikipedia, Leap seconds. | |
| 4 | Metadata | ||
| 5 | Filename | Name of image file without file extension. | essential |
| 6 | OrientationPan | Value for image pan (heading or yaw), see Prepare MM Data Generic Import | |
| 7 | OrientationTilt | Value for image tilt (pitch) | |
| 8 | OrientationRoll | Value for image roll | |
| 9 | CameraName | ||
| 10 | CameraDescription | ||
| 11 | CameraType | ||
| 12 | CameraSubtype | ||
| 13 | CameraFocalX | ||
| 14 | CameraFocalY | ||
| 15 | CameraDeltaX | ||
| 16 | CameraDeltaY | ||
| 17 | CameraDeltaZ | ||
| 18 | CameraDeltaPan | ||
| 19 | CameraDeltaTilt | ||
| 20 | CameraDeltaRoll |
In the import_locations.ord file it is possible to calculate the attribute values using Orbit attribute rules : Attribute Formulas
<template>/panorama/locations.ord
| DataSetCRS | DataSetCRS=<EPSG Code> : Target CRS of imported photo positions. | essential |
Cubic Panoramas
To many configuration possibilities. Contact the Orbit Support for a customized import (support at orbitgis dot com).
Planars
<template>/planar/import/import_locations.csv.import.ini
<template>/planar/import/import_locations.csv.import.ovf
<template>/planar/import/import_locations.ord
| DataSetCRS | DataSetCRS=<EPSG Code> : Source CRS of imported photo positions. | essential |
<template>/planar/locations.ord
Point Cloud
<template>/pointcloud/point/import.ini
| SourceCRS | SourceCRS <EPSG Code> : Source CRS of imported photo positions. | essential |
<template>/pointcloud/import/text_import.ini
This configuration file makes it possible to define the data structure of an Ascii file if used as point cloud import file.
Standards
<template>/pointcloud/point_cloud.ord
| DataSetCRS | DataSetCRS=<EPSG Code> : Target CRS of imported point cloud. | essential |