This is documentation of an archived release.
For documentation on the current version, please check Knowledge Base.
For documentation on the current version, please check Knowledge Base.
Prepare MM Data eagle eye technologies
This page describes Mobile Mapping eagle eye technologies resources for Orbit.
Using the according Orbit Import Templates the described resources can be imported into Orbit.
It is strongly recommend to read first Concepts of Mobile Mapping and UAS data in Orbit.
Panoramas
Image files
- Image type : equirectangular panoramas.
- Image resolution : Ratio 2×1.
- File format : Each image is one *.jpg file.
- File name : Exactly as in image positions file, see below.
- Folder structure : All files in one folder.
Image positions file
- File format : One ascii file (*.csv or *.txt file).
- File structure Rows : Each image is one record.
- File structure Columns : Semicolon separated (char59), with the header, columns in exact order as in the example below.
- Value of Filename : File name as on disk, without file extension.
- Value of Coordinates : any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator..
- Value of Timestamps : Same Time Reference as in the point cloud, see below.
filename;position;utm_easting;utm_northing;z;roll;pitch;heading;relative_path;gps_time 2017030400100035;Sp;372998.50720;5627666.31290;66.12710;-2.25434742;-11.1423136;-145.06483;.\20170304\001;1172651396.57692 2017030400100036;Sp;372996.15300;5627661.77850;65.96450;-2.50318254;-11.2065927;-145.157321;.\20170304\001;1172651438.08756 2017030400100037;Sp;372993.86020;5627657.15740;65.83900;-2.41014747;-11.0368646;-146.26231;.\20170304\001;1172651440.70845 ...
Planars
Image files
- Image type : Undistorted images.
- Image resolution : any.
- File format : Each image is one *.jpg file.
- File name : Exactly as Image ID of photo position file, see below
- Folder structure : all image files of one camera in one folder
Image positions files
- File format : One ascii file (*.csv or *.txt file).
- File structure Rows : Each image is one record.
- File structure Columns : Semicolon separated (char59), with the header, columns in exact order as in the example below.
- Value of Filename : File name as on disk, without file extension.
- Value of Coordinates : any supported coordinate system can be used, Long/Lat order for geographical coordinates, decimal notation, without thousands separator..
- Value of Timestamps : Same Time Reference as in the point cloud, see below.
filename;position;utm_easting;utm_northing;z;roll;pitch;heading;relative_path;gps_time 2017030400100035;4R;372998.32800;5627670.95470;66.33910;-1.31055161;-10.9820617;-72.1601501;.\20170304\001;1172651396.57692 2017030400100036;4R;372995.96300;5627666.41910;66.19290;-1.44647974;-10.7626529;-72.2759452;.\20170304\001;1172651438.08756 2017030400100037;4R;372993.58230;5627661.79430;66.05180;-1.25617162;-10.8029385;-73.398654;.\20170304\001;1172651440.70846 ...
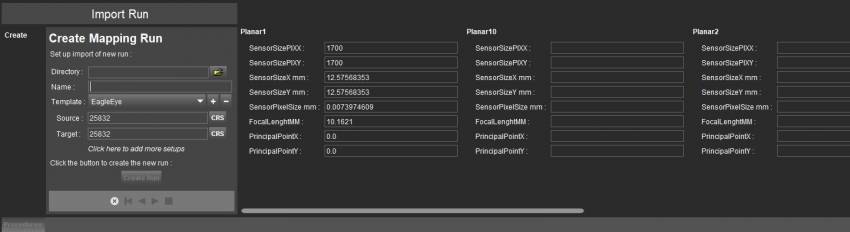
Camera calibration information for every camera
SensorSizePIX=1700,1700 SensorSizeMM=12.57568353,12.57568353 SensorPixelSizeMM=0.0073974609 PrincipalPoint=0.0,0.0 FocalLenghtMM=10.1621
The camera calibration parameters must be entered before Create Run, the 1st step of the Import Run procedure.
To facilitate import, your specific camera calibration values can be registered inside the Orbit template to avoid entering these values at import each time. Contact Orbit Support if assistance is needed.
LiDAR
Point cloud files
- File format : One or more *.las files.
- File structure : Las version 1.2.
- Value of Coordinates : Same CRS as Photo Positions, see above.
Last modified:: 2019/05/07 12:49