For documentation on the current version, please check Knowledge Base.
Preferences of Cable Detection
This page describes only the parameters and preferences of Cable Detector.
Full documentation about semi-automatic detectors, see Basic 3D Measurement Functions.
General concepts of Detectors Preferences, see Preferences of Detectors.
Feature Extraction and Feature Extraction Pro
![]() Main Toolbar > Preferences > Detectors > Cable Detection
Main Toolbar > Preferences > Detectors > Cable Detection
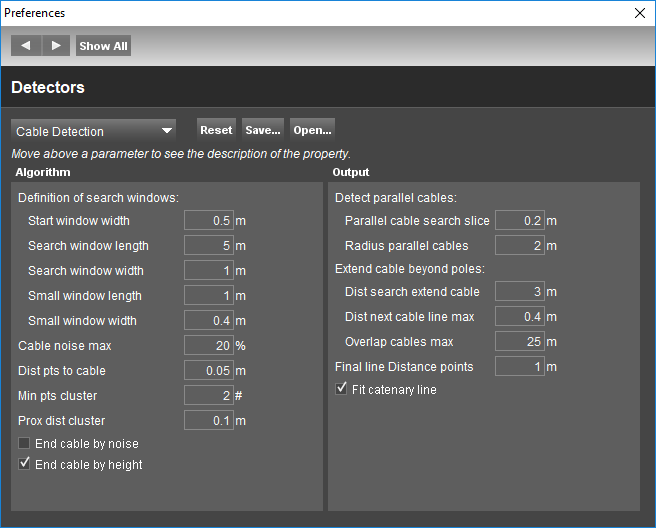
Algorithm
In process of detecting a cable is modeled as sequence of line segments which should meet certain criteria.
Prox dist cluster and Min pts cluster
Parameters define how points will be clustered together: iterational process - If inside 'Prox. dist cluster' distance around existing cluster at least “Min pts cluster' amount of points is found they will be added to the cluster.
Dist pts to cable
Half of maximum diameter of a cable.
Start window width
The first segment is determined by clustering points starting from the point of initial measurement (let's call it a seed cluster) and inside cube of 'Start window width' size around that point and finding best fitting line segment. Cluster will be rejected and measurement stopped if cluster width is bigger than maximum diameter of a cable.
Search window width, Search window length and Small window width, Small window length
Next segment will be detected by searching for points along the line containing previously found segment in both directions. Search window defines the search volume for candidate points; small window allows to split the candidate points into small enough parts to be approximated by line segments.
Cable noise max and End cable by noise
Noise is defined by amount of points in a cluster which are more than radius of the cable distance away from the best fitting segment. It's possible to stop detector if noise exceeds maximum parameter.
End cable by height
Cables are expected to have certain geometry. This check box enables stopping measurement in case if segment with positive slope has consecutive segment having negative slope.
Output
Final line Distance points
Distance between the vertexes of the final output lines.
Fit catenary line
Use special algorithm to get the catenary curve. If disabled detected segments will be joined together by approximated smooth line.
Detect parallel cables
Parallel cable search slice and Radius parallel cables
Size (thickness and radius) of a vertical slice perpendicular to a detected cable. Clusters of points in this slice are used as seed clusters (see above) to start new cable detection.
Extend cable beyond poles
Dist search extend cable
To extend a cable beyond a pole a vertical slice perpendicular to the cable is created and seed clusters of points are found.
Dist next cable line max and Overlap cables max
Starting with the seed clusters new cable lines are detected.They will be accepted if the distance to initial cable line and overlap with it do not exceed provided maximum values.