For documentation on the current version, please check Knowledge Base.
Ghost Cleaning
This page describes the desktop extension “Ghost Cleaning” for Mobile Mapping.
Content Manager
![]() Main Toolbar > Extensions > Ghost Cleaning
Main Toolbar > Extensions > Ghost Cleaning
Concepts
Ghosts : A ghost represents a collection of lidar points that should not be present in the pointcloud. The best examples are moving objects, like cars or people that are recorded in several positions and appear as erroneous points.
Ghost cleaning : The process of removing unwanted objects from the pointcloud. Orbit achieves this goal automatically inside a defined area, by creating a ground surface on the fly and removing all objects above that surface inside a fence. The Ghost cleaning extension only finds, calculates and selects the points that need to be removed, the actual removal of the objects requires Consolidation
Files & folders : All created files and folders are saved in a new folder <name-of-opc-file>.ghostcleaning next to the Orbit Point Cloud file. For each cleaning a new project folder will be created, see bellow “File menu drop-down”.
Sidebar
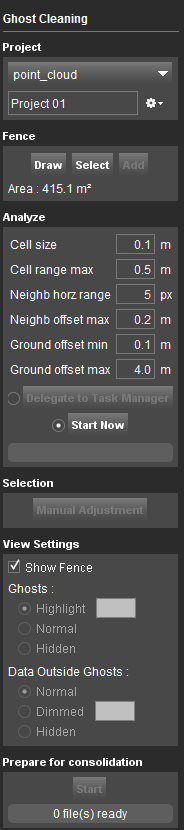
Project
Select Point cloud Dataset
Displays the available opc files in the Dataset List, from which to choose the one on which the ghost cleaning will be performed.
File menu drop-down
Choose where you want to store the cleaning results. A project represents an automatically created destination folder inside your runs pointcloud folder.
For each Ghost Cleaning a new project will be created. Writing new data in an existing project will overwrite existing data in that folder.
Options to create a new project, open a recent project, close or delete a project are available.
Fence
Draw
Draw a fence around the area to clean.
Map CRS must be the same as the pointcloud resource CRS.
Select
Select an already available vector file to use as a fence.
Add
Add a part to an existing fence.
Area
The area of the fence will be calculated and displayed.
Analyze
Define the parameters that will be used in the automatic detection of ghosts.
Cell size
The cell size of the DEM created to define the ground surface.
Cell range max
To be considered “ground” pixel height value should differ from the average height less than cell range max.
Neighb horz range
Amount of pixels around current one where Neighb offset max is applied.
Neighb offset max
The maximum difference pixel height value is allowed to have with the neighboring pixel to be considered “ground”.
Ground offset min
The minimum distance between the ground surface and a point, in order to consider that point a ghost.
Ground offset max
The maximum distance between the ground surface and a point, in order to consider that point a ghost.
Delegate to task manager
See: Task Manager
Start Now Start the ghost detection.It will create separate .ops files for each project.
Selection
Manual Adjustment Allows the manual editing of the points to be included in the selection, and as a result modifies the objects considered as a ghosts. By pressing “Manual Adjustment” the Pointcloud clip tool is opened, which allows manual selection inside the pointcloud.
View Settings
Selection
Choose the way selected ghosts are displayed
- Highlight
- Normal
- Hidden
Data Outside Selection
Choose how data not considered as ghosts is displayed
- Normal
- Dimmed
- Hidden
Prepare for Consolidation
Creates a temporary pointcloud file necessary when the run is consolidated. Several projects can be used at once, the result will be an .opd file stored in the run's pointcloud folder. The function is envisioned to be run only one time for all the projects. To run “Prepare for Consolidation” a second time, the previous .opd file must be deleted.
Start
Start the generation of the .opd file to be used in Consolidation extension.